オープンキャンパス
【”新”高2・3年生向け】4月オープンキャンパスへ行こう🏢(新校舎で開催!)
more
サークル
みなさんこんにちは。
AIシステム科の谷内田です。
本日からいよいよゴールデンウイークが始まります!。ちょっと天候が良くないですが、体調には気を付けて過ごして行きましょう!!!。![]()
さて、まずはロボットサークルの活動報告です。
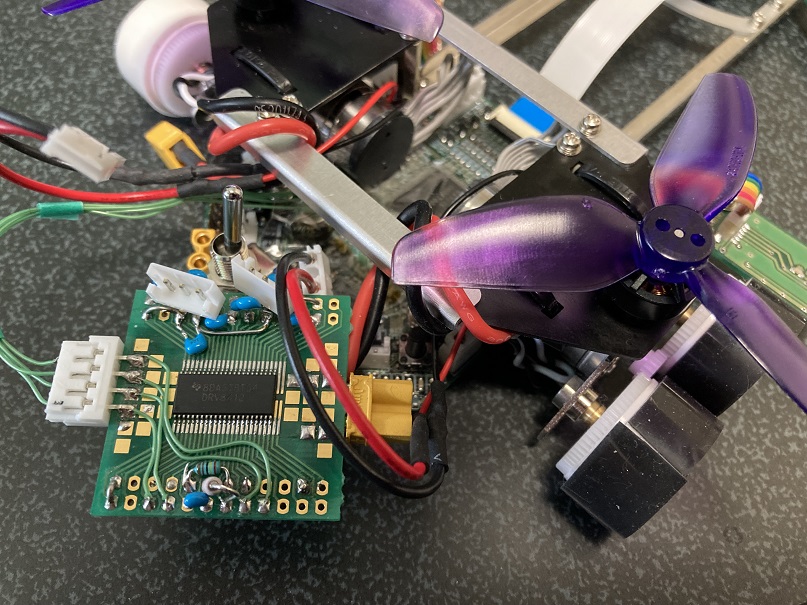
前回、お知らせしました新しいドローンモータへの取り換えが完了しました!。![]()


![]() 右が新しいドローンモータになります。
右が新しいドローンモータになります。
今までのドローンモータの性能が8,000KV(電圧1Vに対して1分間に8,000回転できる)でした。
新しいドローンモータの性能は10,000KV(電圧1Vに対して1分間に10,000回転できる)になりました。
![]() ドローンモータの回転の比較動画です。プログラムは両方とも同じものです。
ドローンモータの回転の比較動画です。プログラムは両方とも同じものです。
ドローンモータには、11.1Vの電圧を加えています。
計算上では、
今までのドローンモータ 電圧1V-8,000回転×11.1V=88,800回転(1分間)
新しいドローンモータ 電圧1V-10,000回転×11.1V=111,000回転(1分間)
になります。
回転数が上がった分、下方向へのダウンフォースが強くなります!!!。![]()
今後、新しいドローンモータで走行テストを行います!。
![]() また、ゴールデンウイーク期間の(私自身の)宿題として、新しい駆動モータのドライバICの実験を行っていく予定です。
また、ゴールデンウイーク期間の(私自身の)宿題として、新しい駆動モータのドライバICの実験を行っていく予定です。
今後もいろいろとご報告していきます!。
楽しみにしていてください。![]()
more
more
more
more
more
more
more